Optimal transport becomes especially powerful once distances between measures
are seen as actions of moving mass. This chapter first develops the dynamic
language: continuity equations describe admissible measure evolutions, while
the Benamou--Brenier formula identifies W2 with a least-action
principle. These ideas prepare the gradient-flow and generative-model
chapters that follow.
from pathlib import Path
import sys
from IPython.display import Image as DisplayImage
from IPython.display import display
here = Path.cwd()
myst_dir = None
for candidate in [here, here.parent, here / "myst", here.parent / "myst", here.parent.parent / "myst"]:
if (candidate / "ot4ml_web.py").exists():
myst_dir = candidate.resolve()
sys.path.insert(0, str(myst_dir))
break
if myst_dir is None:
raise RuntimeError("Could not locate myst/ot4ml_web.py")
repo_root = myst_dir.parent
thumbnails = repo_root / "notebooks-figures" / "thumbnails"
def show_book_figure(name, width=760):
display(DisplayImage(filename=str(thumbnails / f"{name}.png"), width=width))
We start with the continuity equation because it is the common language for
particles, densities and weak measure evolutions. It also makes precise which
velocity fields actually move mass.
This PDE is often called the advection equation, the continuity equation, or
Liouville’s equation when it acts on phase space. It is a classical PDE only
when αt has a smooth density. For general measures, and in particular
for empirical measures, it is understood in the distributional sense: for
every φ∈Cc1((0,1)×Rd),
This weak equation is obtained from (3) by integration
by parts. For smooth positive densities, the classical and weak formulations
are equivalent; for particle clouds, the weak form remains meaningful.
Reconstructing particles from an observed density evolution is therefore
ill-posed. For a smooth positive density αt=ρtdx, a simple
choice, introduced by Dacorogna and Moser Dacorogna & Moser, 1990, imposes
that the flux ρtvt is a gradient field. With a fixed convention for
the inverse Laplacian,
with suitable boundary conditions, for instance vanishing at infinity. This
formula is useful conceptually but delicate when ρt vanishes, and it
does not generally produce a gradient velocity field.
The classical Dacorogna--Moser construction uses the linear density path. If
αi=ρidx are smooth positive densities with the same total mass
on a bounded domain Ω, set
satisfies ∂tρt+div(ρtvt)=0. The flow
∂tTt=vt∘Tt, T0=Id, therefore transports
ρ0dx onto ρtdx, and T1 solves the prescribed-Jacobian
problem
ρ1(T1(x))det(∇T1(x))=ρ0(x).
A more robust choice, used implicitly in flow matching, optimal transport and
Wasserstein gradient flows, is to select among all admissible velocities the
one with smallest kinetic energy:
The pointwise minimizer in vt is therefore vt=∇ϕt.
Substituting this into
∂tρt+div(ρtvt)=0 gives the weighted
Poisson equation in (17). The inverse notation
is a shorthand for solving this equation on zero-mean right-hand sides,
modulo additive constants.
In general this inversion is still computationally demanding, but special
choices of (αt)t lead to simpler formulas; this is the mechanism
exploited later by flow matching in Section Generative Models via Flow Matching.
The dynamic formulation identifies W2 with the kinetic energy of the
cheapest continuity-equation path. It is the point where OT becomes a
least-action principle.
Instead of assuming that a whole curve (αt)t∈[0,1] is prescribed,
one fixes only the endpoints α0 and α1 and minimizes the
least-square energy (15). The theorem of Benamou and
Brenier states that this geodesic energy is exactly the squared Wasserstein
distance Benamou & Brenier, 2000.
Proof
For the inequality “dynamic ≤ static”, assume first that a Monge map
T exists and define (αt,vt) by (21). Since
the Lagrangian velocity T(x)−x is independent of t,
so the dynamic cost is no larger than the static Monge cost. Without a Monge
map, the same construction uses an optimal coupling π: sample
(X,Y)∼π and move along the straight path
γX,Y(t)=(1−t)X+tY. This path measure has action
∫∥x−y∥2dπ(x,y); projecting path velocities onto their
conditional mean at time t gives an admissible Eulerian velocity with no
larger action, so the dynamic value is no larger than the Kantorovich value.
Conversely, for a smooth deterministic path, take the flow Tt defined by
T˙t=vt∘Tt and T0=Id. Then
αt=(Tt)♯α0 and (T1)♯α0=α1.
Jensen’s inequality gives
After integration with respect to α0, the Monge cost is bounded above
by the dynamic action. For general finite-energy solutions of the continuity
equation, the superposition principle lifts the curve to a probability
measure on absolutely continuous paths; applying Jensen’s inequality pathwise
gives a coupling of the endpoints whose quadratic cost is no larger than the
action. Thus the Kantorovich value is bounded above by the dynamic value.
This lower-semicontinuous convex function is positively 1-homogeneous:
J(ηa,ηm)=ηJ(a,m) for η≥0. If λ is any positive
measure dominating both α and the total variation ∣ω∣, set
The value is independent of the dominating measure: both Radon--Nikodym
densities change by the same factor, and the 1-homogeneity of J cancels
the change of reference measure. This is the integral functional associated
with a convex normal integrand in the measure-valued relaxation of dynamic OT
Ambrosio et al., 2006; see also the perspective construction in
Rockafellar, 2015. Moreover,
In the absolutely continuous case αt=ρtdx and
ωt=mtdx, this reduces to the familiar integral of
J(ρt,mt)=∥mt∥2/ρt, with the zero-density conventions already
encoded in (25). This convex reformulation enables
geodesic interpolation by convex optimization after discretization.
The momentum formulation also has a useful dual. It turns the least-action
problem into a Hamilton--Jacobi subsolution inequality for a scalar potential,
with equality on the part of space-time actually visited by the optimal curve.
With the no-1/2 convention of (28), the constants
are as follows.
Proof
Let (ρ,m) satisfy the continuity equation and let ϕ be smooth.
Multiplying the constraint by ϕ and integrating by parts gives
with the usual perspective convention. Thus the dual objective of every
feasible potential is no larger than the action of every feasible primal pair.
Conversely, introducing
ϕ as a Lagrange multiplier for
∂tρ+divm=0, and discarding the fixed endpoint
contribution, the pointwise minimization contains
∥m∥2/ρ−ρ∂tϕ−⟨m,∇ϕ⟩. Minimizing over
m gives m=ρ∇ϕ/2; minimizing over ρ≥0 is finite exactly
under ∂tϕ+∥∇ϕ∥2/4≤0. Fenchel--Rockafellar duality
then gives no duality gap in finite-dimensional discretizations. The
continuum identity follows by the usual relaxation and approximation, with
ϕ interpreted as a Hamilton--Jacobi subsolution. Equality in the two
pointwise inequalities gives (30).
This also recovers the static Kantorovich inequality from a dynamic principle.
If γ is any smooth curve with γ(0)=x and γ(1)=y, then
Thus (−ϕ0,ϕ1) is a feasible static Kantorovich dual pair for the
quadratic cost. At optimality the inequality is saturated on the endpoint pairs
connected by the primal characteristics.
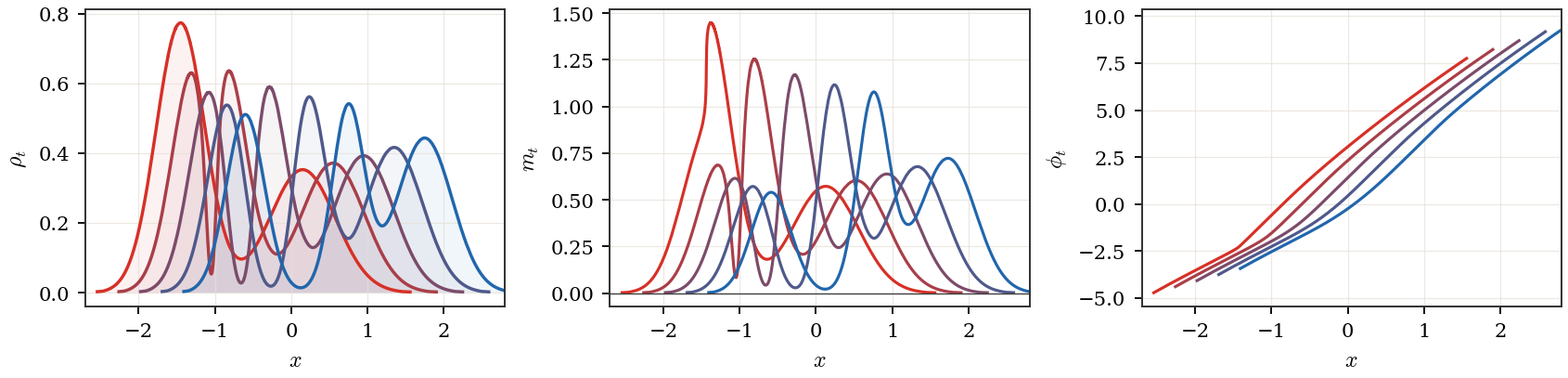
Figure Div displays these primal--dual
relations for a one-dimensional mixture transport, including the
Hamilton--Jacobi contact identity along the active mass.
One-dimensional Benamou--Brenier primal and dual solutions. The endpoints
are Gaussian mixtures and the solution is computed from monotone quantile
interpolation. The panels show the primal density, the momentum
mt=ρtvt, and the dual Hamilton--Jacobi potential. Along the active
transported mass, the notebook checks mt=ρt∂xϕt/2 and
∂tϕt+∣∂xϕt∣2/4=0.
The convex momentum formulation also explains the original Benamou--Brenier
solver. After discretization, the ALG2 scheme can be read as a
Douglas--Rachford splitting, equivalently ADMM on the Fenchel--Rockafellar
dual Papadakis et al., 2014. Suppressing discretization indices, write
U=(ρ,m), let F(U) be the integral of the perspective action,
and let G=ιC be the indicator of the affine
continuity constraint with prescribed endpoints. The problem is
minUF(U)+G(U).
The two proximal operators separate the nonlinear and linear parts: the prox
of F is local in (t,x) and amounts to the perspective proximal
operator, whereas the prox of G is the orthogonal projection onto
the divergence equation and endpoint constraints. Douglas--Rachford alternates
these two simple operations.
Figure Div complements the Eulerian
optimization viewpoint with the Lagrangian picture: matched particles travel
along the straight characteristics of the minimizing curve.
Benamou--Brenier geodesic between two sampled silhouettes. A discrete
quadratic OT plan between finely subsampled cat and two-disks point clouds
induces the McCann interpolation Zt=(1−t)X+tY, which is the Lagrangian
realization of the least-action solution. The left panel renders
local color images of the smaller-bandwidth kernel-smoothed densities with
enough padding to include the full silhouettes. The right panel overlays
shortened velocity arrows centered at evenly subsampled midpoint particles
Z1/2; each displayed arrow runs in data coordinates from a source-side
tail to a target-side head along the matched characteristic direction Y−X,
but is not drawn as the full endpoint segment from X to Y.
The interactive demo keeps the same Lagrangian picture: particles are matched once,
then move along straight characteristics. The time and velocity scale controls
separate the path αt from the underlying displacement field.
Interactive panel. Use the time and velocity-scale controls to follow the Benamou-Brenier geodesic as a moving density with an Eulerian velocity field.
The inner energy is understood as +∞ outside the absolutely continuous
paths. If α0 has a density, the minimizer M∗ is unique. Its time
marginals reproduce the optimal curve: αt=(et)♯M∗ for all
t. Furthermore, for a.e. t, the conditional law of the path velocity is
deterministic:
where vt∗ is the optimal velocity field in the Benamou--Brenier formulation. Hence M∗ concentrates on straight-line geodesics and, for a.e. t, assigns exactly one direction at αt-a.e. spatial point.
The quadratic Benamou--Brenier formula is only one instance of a broader
fixed-mass dynamic language. The goal of this section is to define a large
family of geodesic-like distances on spaces of probability measures by
modifying the action minimized in the Benamou--Brenier formula. The objects
introduced here are metric: they specify admissible curves, tangent variables
and path energies. All descent constructions are postponed to
Generalized Dynamic Wasserstein Flows, where these distances are used
to generate gradient-flow PDE models.
The common construction replaces the quadratic kinetic energy in the
Benamou--Brenier formula by an instantaneous action while retaining the
continuity equation and endpoint constraints.
In the mass-preserving Euclidean setting, the basic input is an instantaneous
action A(α,w), where α is the current measure and w is
an admissible velocity representative. When this action is normalized as a
squared infinitesimal speed, it generates the length-space value
Equivalently, one may quotient by velocity fields that induce the same
first-order variation of the measure. The formula above should be read as a
dynamic definition of the distance, not as a property automatically satisfied
by an arbitrary discrepancy. Some standard distances, such as Wp, are
first written with a p-homogeneous action and then squared by taking a
constant-speed parametrization; this normalization is made explicit below.
Different choices of A change the resulting geometry;
Generalized Dynamic Wasserstein Flows later reuses these choices
when dynamics are introduced.
A particularly transparent case occurs when w↦A(α,w) is
quadratic. For simplicity, take admissible velocities in
L2(α;Rd); in some applications this Hilbert space is replaced by a
closed subspace encoding additional constraints. Suppose the polarization of
A is represented by a positive self-adjoint operator
Qα:L2(α;Rd)→L2(α;Rd),
The usual W2 geometry corresponds to Qα=Id in this simplified
notation. Thus Qα records how the chosen geometry deforms the Euclidean
L2(α) tangent norm: no deformation for
W2, and a nontrivial tensor for generalized Riemannian geometries.
Generalized Dynamic Wasserstein Flows later reuses the same tensor as
a preconditioner for metric descent.
For a fixed reference λ, this covers density-dependent mobilities and
congestion constraints. If, in addition, A is positively 1-homogeneous in
its first variable, A(ηa,w)=ηA(a,w) for η≥0, then the same
formula is intrinsic: replacing λ by another dominating measure gives
the same value. The usual Benamou--Brenier action is the model case
The same action can be written in momentum variables, and this is the form in
which convexity and metric properties are easiest to read. Set ω=αw,
so that ω is a vector-valued measure. When the local description is written
with the same reference λ, so that α=aλ and
ω=mλ, the pointwise momentum perspective is
with value +∞ if α or the total variation ∣ω∣ is not absolutely continuous with
respect to λ. This zero-density convention is the lower-semicontinuous
one for the superlinear actions used below; other growths use the corresponding
recession extension. If A is positively 1-homogeneous in a, then JA is
jointly 1-homogeneous: JA(ηa,ηm)=ηJA(a,m). In that intrinsic
case the value of JA,λ is independent of the dominating
reference measure, and we write simply JA.
For A2(a,w)=a∥w∥2, one recovers the quadratic perspective
hence P(s2,m)≤P(s1,m). Let
aζ=(1−ζ)a0+ζa1 and
mζ=(1−ζ)m0+ζm1. Concavity of θ gives
θ(aζ)≥(1−ζ)θ(a0)+ζθ(a1). Monotonicity in
s, followed by convexity of P, gives
Boundary cases follow from the lower-semicontinuous extension.
The next proposition isolates the assumptions under which the momentum
formulation generated by A defines a path metric rather than only a
variational principle.
Proof
Zero self-distance is obtained by the constant curve. Conversely, if the
distance is zero, attainment supplies a relaxed zero-action minimizer. Thus
JA,λ(αt,ωt)=0 a.e., hence
ωt=0 a.e.; the continuity equation then gives α0=α1.
Symmetry follows by time reversal and evenness in m. For the triangle
inequality, concatenate two almost optimal curves with
actions E1,E2, allocating time fractions τ and 1−τ. By
r-homogeneity the action is τ1−rE1+(1−τ)1−rE2. Optimizing in
τ gives (E11/r+E21/r)r, and the result follows after taking
infima.
Without homogeneity or nondegeneracy, the same momentum action remains useful as
a variational principle, but its r-th root need not define a distance.
One can instead keep a quadratic momentum action and change the mobility.
Dolbeault, Nazaret and Savaré introduced this construction as a class of
generalized transport distances adapted to nonlinear diffusion
Dolbeault et al., 2009. Let I⊂[0,+∞) be a convex interval and
let θ:I→[0,+∞) be concave. Define
Jθ(a,m):=⎩⎨⎧∥m∥2/θ(a),0,+∞,θ(a)>0,θ(a)=0 and m=0,θ(a)=0 and m=0.
The convexity of Jθ is the special case L(u)=∥u∥2 of
Proposition Proposition: Concave Mobilities Give Convex Momentum Actions. This is why concavity
of the mobility, rather than convexity, is the structural condition that makes
the continuity-equation formulation convex.
Fix now a reference measure λ. If α=aλ, the induced squared
tangent action is
Hence this is a local Riemannian case whenever the multiplier
a(x)/θ(a(x)) is finite and positive, in the sense of
(40). The associated tensor is the
multiplication operator
defined α-a.e. on the set where θ(a)>0. Except for linear
mobilities θ(a)=ca, and in particular the normalized case θ(a)=a
which recovers W2, the pointwise velocity action Aθ(a,w) is not
positively 1-homogeneous in the density variable a. Consequently the
construction is not intrinsic under a change of λ: the resulting
distance depends on the chosen reference measure and is finite only between
endpoints that can be joined by a finite-action curve with
αt≪λ.
where the subscript λ recalls that the action is measured through the
density a=dα/dλ. Equivalently, because this action is quadratic
in the momentum, Wθ,λ2 is the path value
(38) with
A=Aθ,λ.
Moreover Jθ(a,m)=0 if and only if m=0, with the boundary convention
used in its definition. For the fixed reference λ, the hypotheses of
Proposition Proposition: Homogeneous Dynamic Actions Define Distances therefore hold with
r=2; the compactness hypothesis supplies its existence assumption. That
proposition gives symmetry, separation and the triangle inequality for
DAθ,λ, hence for Wθ,λ.
The choice θ(a)=a recovers W2. Other choices encode different
geometry: θ(a)=aγ with 0<γ≤1 changes the cost of moving
dilute mass, while θ(a)=a(1−a/M) on [0,M] models a volume-filling or
exclusion effect. The distance is comparable with W2 on classes where
θ(a) is bounded above and below by positive multiples of a; otherwise
zero-mobility barriers can make some pairs infinitely far apart.
The static spectral distances of Spectral and Robust Wasserstein Distances
penalize a coupling through the covariance of its displacement. A dynamic
version keeps the continuity equation but replaces the pointwise kinetic energy
by a gauge of the whole velocity covariance. The resulting action is nonlocal in
space: velocity directions are charged globally through their covariance, rather
than independently at each point.
Let γ be a monotone spectral gauge on S+d. For a probability
measure α and a velocity field v∈L2(α;Rd), define the
spectral tangent action
The trace gauge gives the usual Wasserstein tangent action, while the operator
gauge γ(M)=λmax(M) charges only the largest directional
velocity variance. With the length-distance notation introduced in
(38), the associated dynamic action
distance is
This functional is convex in the density--momentum fields (ρ,m) by the
matrix perspective, together with the monotonicity and convexity of γ. It
is nevertheless not, in general, obtained by integrating a pointwise action
density, because the covariance is computed globally before applying γ.
It becomes local only for linear spectral gauges. For instance, if
γ(M)=tr(GM) with G⪰0, then the velocity and
momentum densities are
and the trace gauge, G=Id in γ(M)=tr(GM), recovers the
usual Benamou--Brenier action.
The following result, in the form used for normalized spectral flows in
Peyré, 2026, shows that this dynamic construction is not merely
infinitesimal: it exactly recovers the static displacement-covariance
formulation.
Proof
First let π∈Π(α0,α1), let (X,Y)∼π, set
Zt=(1−t)X+tY and αt=(Zt)♯π, and define the Eulerian velocity
as the conditional mean vt(z)=E[Y−X∣Zt=z]. Then
(αt,vt) solves the continuity equation. If
Mπ=∫(x−y)(x−y)⊤dπ(x,y) and
Ct=∫vt(z)vt(z)⊤dαt(z), conditional Jensen gives
Ct⪯Mπ: for every u∈Rd,
Since γ is monotone for the Loewner order,
∫01γ(Ct)dt≤γ(Mπ). Infimizing over π gives
Wγ,dyn2≤Wγ2.
Conversely, let (αt,vt) be a finite-action competitor. Since γ
is a finite positive gauge on the finite-dimensional cone S+d, it is
equivalent to the trace on this cone; hence finite spectral action gives finite
kinetic energy. By the superposition principle, the competitor is represented by
a probability law η on absolutely continuous paths satisfying
ω˙t=vt(ωt). For the endpoint coupling
π=(e0,e1)♯η, Jensen along each path gives
The static value is thus no larger than any dynamic action. The crucial
hypothesis is the monotonicity of γ: the proof only produces Loewner-order
comparisons of covariance matrices, and these comparisons control the action
only for monotone gauges.
The use of this geometry for normalized flows, including the operator-gauge connection with Muon-type normalization, is developed in Dynamic Spectral Wasserstein Flows.
A different way to deform the Benamou--Brenier geometry is to keep the local
continuity equation but to measure velocities in a reproducing-kernel Hilbert
space rather than in L2(α). This construction is motivated by Stein
variational gradient descent, studied later in Stein Variational Gradient Descent:
the kernel makes the velocity field smooth and computable from particles, at
the price of defining a much more restrictive transport geometry.
Let k be a positive definite kernel on Rd with scalar RKHS
Hk. The vector-valued RKHS is
where the general distance formula (38)
is understood with the restricted admissible tangent class
vt∈Hkd. The action itself is independent of α; the measure only
enters through the continuity equation
∂tαt+div(αtvt)=0, which says how the common smooth
velocity field moves all particles. This type of Stein geometry was introduced
in the analysis of SVGD by Liu and Wang Liu & Wang, 2016Liu, 2017
and later developed geometrically in Duncan et al., 2023Nüsken & Renger, 2023.
The important caveat is that the admissible tangent space is the smooth RKHS
class, not the whole Wasserstein tangent space.
Proof
The constant curve gives zero self-distance. The RKHS evaluation bound gives
∥v(x)∥≤κk∥v∥Hkd. Therefore, for every
φ∈Cc1(Rd) and every admissible curve of action E, the weak
continuity equation and Cauchy--Schwarz imply
Taking the infimum over curves proves separation without assuming that a
zero-action minimizer exists. Symmetry follows by time reversal and by
replacing vt with −v1−t. For the triangle inequality, concatenate two
almost optimal curves of actions E1 and E2. Compressing them into time
intervals of lengths τ and 1−τ changes the total action to
E1/τ+E2/(1−τ). Optimizing gives
(E1+E2)2, and taking infima yields the claim.
One should read Wk as an extended distance on finite-action
components, not as a replacement for W2 on all of P2(Rd). A useful
sufficient condition for finiteness is that the endpoints lie on the same
RKHS-flow orbit: if there exists v∈L2([0,1];Hkd) whose flow map
Φt solves Φ˙t=vt∘Φt and satisfies
α1=(Φ1)♯α0, then
Wk2(α0,α1)≤∫01∥vt∥Hkd2dt.
In particular, for strictly positive definite kernels, two discrete measures
with the same weights and distinct moving support points are at finite distance
whenever their atoms can be connected by noncolliding smooth paths, because RKHS
interpolation constructs vector fields realizing the prescribed atom velocities
along the paths.
The same condition also explains the limitation. If k is smooth enough that
Hkd embeds into Lipschitz vector fields, finite-action curves are induced
by regular flows. Atomic measures remain atomic with the same number of atoms,
so a Dirac mass cannot be transported at finite kernelized action to a measure
with a density. This lack of splitting is precisely what makes the geometry
useful for deterministic particle methods, and also what makes it a nontrivial
extended object rather than a full probability metric.
The local dynamic distances above transport mass through a vector field on the
base space and a classical continuity equation. Nonlocal geometries use a
different tangent model: the elementary motion is an exchange across an edge or
a jump from x to y. The common data are a reversible kernel K, a symmetric
edge or jump measure J, a pairwise increment ∇ˉ, and a
pair-space action AK. The tangent variable is therefore attached to
pairs of points, not to a single point x, so these constructions are not
simply obtained by choosing another pointwise local action-density
A(ρ(x),m(x)).
There are two complementary versions. On a finite state space, the goal is to
put a Wasserstein-like geometry on the probability simplex so that the entropy
gradient flow is exactly a prescribed reversible Markov chain
Maas, 2011Mielke, 2013Chow et al., 2012. On a continuum space, the
same edge calculus becomes a jump calculus over X×X, which models
nonlocal motion, heavy-tailed jumps, and fractional-type diffusion; this is the
construction of Erbar Erbar, 2014, building on nonlinear
mobilities Dolbeault et al., 2009, with subsequent metric and asymptotic
refinements Slepčev & Warren, 2022.
In both settings the canonical mobility for entropy is the logarithmic mean
with the usual lower-semicontinuous extension at a=0 or b=0. It appears
because θ(a,b)(loga−logb)=a−b, which is the edge-wise chain rule
identifying entropy-driven flows with the underlying reversible Markov or jump
dynamics.
The continuum version replaces graph edges by a symmetric measure on pairs. Its
action is still quadratic, but the tangent variable is an antisymmetric jump
velocity v(x,y), and the mobility depends simultaneously on the two endpoint
densities ρ(x) and ρ(y). It is best viewed as a convex action on the
pair space X×X, rather than as an integral of independent costs
attached to single base points x.
Let (X,m) be a reference measure space, and let
K(x,⋅) be a nonnegative measure on X for each
x∈X, possibly of infinite total mass. We write this kernel as
K(x,dy) to emphasize that the integration variable is y. The pair measure
J on
X×X is defined by testing against nonnegative measurable
functions Φ:
for the nonlocal gradient, and use the logarithmic mean θ defined in
(75). A curve αt=ρtm driven by an
antisymmetric velocity vt(x,y)=−vt(y,x) satisfies the nonlocal continuity
equation if, for all test functions φ,
where the infimum is over curves solving (78) with
endpoints α0,α1.
Proof
We use the analytic compactness and lower-semicontinuity theorem of
Erbar (2014) for the logarithmic-mean action. Namely,
action-bounded sequences of admissible curves are compact for the narrow
topology, the weak nonlocal continuity equation is closed under this
convergence, and the action is lower semicontinuous.
Nonnegativity is immediate from the definition of AK(α,v). If
α0=α1, the constant curve ρt=ρ0, vt=0, is admissible
and has zero action.
Symmetry follows by time reversal. If (ρt,vt) transports α0 to
α1, set ρ~t=ρ1−t and v~t=−v1−t. The weak
continuity equation is preserved by this change of time, and the quadratic
action is unchanged. Thus WK(α0,α1)=WK(α1,α0).
For the triangle inequality, let (ρt0,vt0) connect α0 to
α1 with action A0, and let (ρt1,vt1) connect α1 to
α2 with action A1. For 0<ζ<1, concatenate the two curves by
The velocity factors are exactly those required by the weak continuity equation
after time rescaling. Since v↦AK(α,v) is quadratic, the concatenated
action is
Optimizing in ζ, for instance taking
ζ=A0/(A0+A1) when both actions are positive,
gives the action (A0+A1)2. Taking infima over the two curves
proves the triangle inequality.
If WK(α0,α1)=0, choose admissible curves with actions
tending to zero. Compactness and lower semicontinuity give a limiting admissible
curve of zero action. Hence vt=0 for
θ(ρt(x),ρt(y))J(dx,dy)dt-a.e. (t,x,y), and the
weak continuity equation gives
for every admissible test function φ. The irreducibility/separation
assumption in Erbar (2014) ensures that these test functions
determine the measure, so αt is constant and α0=α1.
Finally, if WK(α0,α1)<+∞, the same direct-method
compactness applied to a minimizing sequence gives a minimizer. Reparametrizing
this minimizing curve by metric arclength gives a constant-speed curve; after
this parametrization,
The consequences for entropy dynamics and fractional PDE examples are developed
in the nonlocal Wasserstein-flow section below.
For a fixed jump kernel this geometry is genuinely nonlocal and does not
coincide with ordinary W2. The local metric is nevertheless recovered
in a small-jump limit. More explicitly, on X=Rd, let
η(z)=ηˉ(∥z∥) be a nonnegative radial profile with
Equation (87) is the precise sense in which the
second-moment jump scale is ε. To obtain a nontrivial local limit,
one simultaneously accelerates the jump rate by ε−2 and sets
Multiplying a jump kernel by c>0 divides the associated distance by
c. Hence, under the regularity and irreducibility hypotheses of
Slepčev & Warren (2022), for endpoints supported in a
fixed compact set,
This makes precise how sharply concentrated isotropic jumps recover the local
Benamou--Brenier geometry. Without isotropy, the covariance matrix in
(87) need not be proportional to the identity,
and the limit is instead an anisotropic Wasserstein geometry.
The finite-state version keeps the same pair-space philosophy, but with a finite
graph of admissible exchanges. It is not the naive Euclidean metric on the
simplex. The key idea, introduced by Maas and independently developed in related
forms by Mielke and by Chow--Huang--Li--Zhou, is to use the transition graph of
a reversible Markov chain to define both the admissible directions and the
mobility of the mass Maas, 2011Mielke, 2013Chow et al., 2012. The
entropy gradient-flow interpretation is stated later in
Proposition: Entropy Gradient Flow of a Reversible Markov Chain.
Let X={1,…,n} and let K=(Kij) denote the off-diagonal
transition rates of an irreducible continuous-time Markov chain reversible with
respect to a probability vector π, so that πiKij=πjKji for
i=j. Write
The logarithmic mean θ defined in (75) is the
mobility selected so that the entropy calculus later recovers exactly the Markov
evolution. The identity θ(a,b)(loga−logb)=a−b converts entropy
gradients into density differences along graph edges. For a potential
ψ∈Rn, set
This is the finite-state squared tangent action; the tangent
variable is the potential ψ, or equivalently the induced edge flux, rather
than an ambient Euclidean vector field.
with endpoint conditions at=0=a0 and at=1=a1. Equivalently, one can
write the same formula in edge-flux variables: flux is only allowed along edges
where Kij>0, and the denominator in the kinetic energy is the logarithmic
mean of the two relative endpoint densities ρi(a)=ai/πi.
The first nontrivial finite Markov geometries already show how the logarithmic
mean bends the simplex. In both examples below, take the uniform random walk on
the complete neighbor graph, so πi=1/n and Kij=1/(n−1) for i=j.
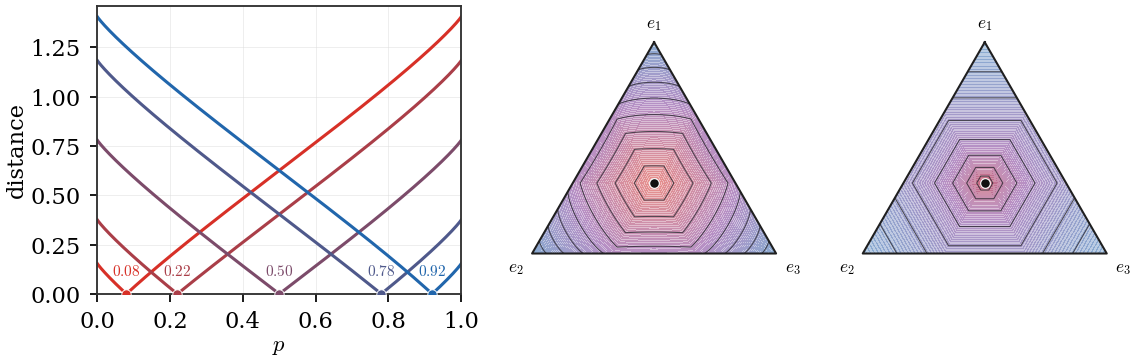
Figure Div visualizes these small-dimensional geometries and compares them with the ordinary Wasserstein distance associated with the 0/1 ground metric, for which W22 is exactly the total variation distance.
Discrete Wasserstein distances on small Markov-chain simplices. The left panel shows
the closed-form profiles r↦WK(ar,ar0), with
ar=(r,1−r), for several anchors r0 on Σ2. The middle panel shows
numerical level sets of WK(a,aˉ) on Σ3, where
aˉ=(1/3,1/3,1/3), using the local Riemannian norm induced by the
complete-neighbor Markov chain. The right panel shows the corresponding level
sets for the ordinary W2 distance with d(i,j)=1 for i=j, so that
W22(a,aˉ)=∥a−aˉ∥TV.
Interactive panel. Move the anchor in the two-state formula and refine the
three-state grid to compare the Markov-chain Riemannian distance with the
ordinary simplex distance induced by the 0/1 ground metric.
Balanced dynamic distances keep the total mass fixed: their tangent vectors are
transport velocities or fluxes satisfying a continuity equation. Unbalanced
distances use a different tangent model. A tangent vector now has both a
spatial component and a reaction component, so mass can move, disappear, and
reappear. This section isolates this reaction--transport geometry before its
use for gradient flows in Dynamic Unbalanced OT and WFR Flows.
Unbalanced dynamic transport is obtained by allowing mass to be created and
destroyed along the path. At the density level, the continuity equation becomes
a balance equation and an admissible tangent direction is a pair (m,s): the
flux density m transports mass, while the source density s changes its
amount locally. This formulation underlies the Hellinger--Kantorovich and
Wasserstein--Fisher--Rao metrics
Liero et al., 2016Chizat et al., 2018; its equivalence with static
entropy-transport and cone formulations is developed in
Liero et al., 2018Chizat et al., 2018.
with the usual perspective convention: zero flux and zero source through zero
density cost nothing, whereas nonzero flux or source through zero density has
infinite cost. At the measure level these densities become the vector-valued
flux measure ωt=mtdx and the signed source measure
σt=stdx.
Thus, writing mt=ρtvt and st=ρtgt, the smooth action is
∫01∫Aκ(ρt,vt,gt)dxdt under
∂tρt+∇⋅(ρtvt)=gtρt. The parameter
κ fixes the relative cost of reaction and transport.
For the convex measure formulation, set m=aw and r=ag. The corresponding
three-variable perspective is
For measure-valued triples, α denotes the transported measure, ω the
vector-valued flux measure, and σ the signed source measure. If
λ dominates α, ∣ω∣ and ∣σ∣, define
The one-homogeneity of Jκ makes this definition independent of the
chosen dominating measure. Finite action forces both the flux and source to be
absolutely continuous with respect to the transported mass.
The balance-equation formula is the least-action representation of the same
cone distance used in static unbalanced OT. To make the normalization explicit,
define on the cone C[Rd] the squared cost
For κ=1/2, this is exactly the normalization of the
Hellinger--Kantorovich cone cost used in Unbalanced OT.
Proof
The cone construction turns variation of mass into radial motion and spatial
transport into angular motion. The normalization can be checked on a smooth
cone path: if its base position is xt, its radius is rt, and the projected
mass is at=rt2, then gt=a˙t/at=2r˙t/rt. The infinitesimal
energy induced by (107) is therefore
which is precisely (104). Applying the
Benamou--Brenier theorem on the cone to lifted endpoints gives a least-action
problem with static value CWκ. Projecting with the squared radius as
weight produces (αt,ωt,σt) satisfying the balance equation,
and the cone kinetic energy becomes Jκ. Conversely, every
finite-action triple admits, after relaxation, a cone lift with the same
action. Lower semicontinuity extends the smooth argument to finite measures;
see Liero et al., 2016Liero et al., 2018Chizat et al., 2018Chizat et al., 2018.
The distinction is visible for mixtures with mismatched modal masses. Balanced
transport must physically move excess mass, whereas unbalanced transport can
trade transport against reaction. The next figure uses entropic balanced and
KL-relaxed barycenters as a qualitative numerical surrogate: the unbalanced
row illustrates the mechanism but is not asserted to be an exact
WFRκ geodesic.
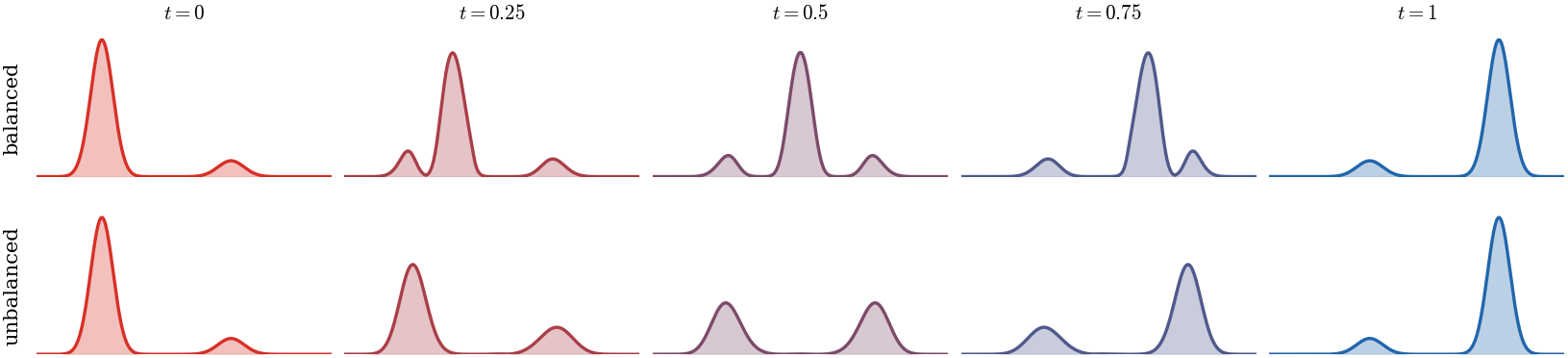
Figure Div uses entropic balanced and KL-relaxed barycenters as a qualitative numerical surrogate; its unbalanced row illustrates the reaction--transport mechanism but is not asserted to be an exact WFRκ geodesic.
show_book_figure("dynamic-unbalanced-geodesic")
Balanced and unbalanced Sinkhorn-barycenter interpolations between two
one-dimensional Gaussian mixtures with swapped modal masses. The balanced row
conserves total mass, so excess mass from the dominant left mode must move
along the line toward the dominant right target mode, producing transient mass
in the middle. The unbalanced row uses KL-relaxed marginal constraints; mass
can be attenuated near overrepresented modes and recreated near
underrepresented modes, giving a reaction--transport interpolation closer to
the Wasserstein--Fisher--Rao intuition.
Together, the local, spectral, kernelized, jump, graph, and unbalanced examples
show that modifying the Benamou--Brenier action changes both the admissible
motion and the topology of the measure space. The next chapter turns these
geometries into gradient-flow equations.
Dacorogna, B., & Moser, J. (1990). On a Partial Differential Equation Involving the Jacobian Determinant. Annales de l’Institut Henri Poincaré C, Analyse Non Linéaire, 7(1), 1–26.
Benamou, J.-D., & Brenier, Y. (2000). A computational fluid mechanics solution to the Monge-Kantorovich mass transfer problem. Numerische Mathematik, 84(3), 375–393.
Ambrosio, L., Gigli, N., & Savaré, G. (2006). Gradient Flows in Metric Spaces and in the Space of Probability Measures. Springer.
Rockafellar, R. T. (2015). Convex Analysis. Princeton university press.
Papadakis, N., Peyré, G., & Oudet, E. (2014). Optimal transport with proximal splitting. SIAM Journal on Imaging Sciences, 7(1), 212–238.
Beckmann, M. (1952). A continuous model of transportation. Econometrica, 20, 643–660.
Dolbeault, J., Nazaret, B., & Savaré, G. (2009). A new class of transport distances between measures. Calculus of Variations and Partial Differential Equations, 34(2), 193–231.
Peyré, G. (2026). Muon Dynamics as a Spectral Wasserstein Flow. arXiv Preprint arXiv:2604.04891.
Liu, Q., & Wang, D. (2016). Stein Variational Gradient Descent: A General Purpose Bayesian Inference Algorithm. Advances in Neural Information Processing Systems, 29. https://arxiv.org/abs/1608.04471
Duncan, A. B., Nüsken, N., & Szpruch, L. (2023). On the Geometry of Stein Variational Gradient Descent. Journal of Machine Learning Research, 24(56), 1–39. https://www.jmlr.org/papers/v24/20-602.html
Nüsken, N., & Renger, D. R. M. (2023). Stein Variational Gradient Descent: Many-Particle and Long-Time Asymptotics. Foundations of Data Science, 5(3), 286–320. 10.3934/fods.2022023
Maas, J. (2011). Gradient flows of the entropy for finite Markov chains. Journal of Functional Analysis, 261(8), 2250–2292.
Mielke, A. (2013). Geodesic convexity of the relative entropy in reversible Markov chains. Calculus of Variations and Partial Differential Equations, 48(1–2), 1–31.
Chow, S.-N., Huang, W., Li, Y., & Zhou, H. (2012). Fokker-Planck equations for a free energy functional or Markov process on a graph. Archive for Rational Mechanics and Analysis, 203(3), 969–1008.